|
Our AUV
Leviathan is our 2021 autonomous underwater vehicle (AUV) designed to be "future-proof" for the next five years. It features new competitive abilities including ease of motion, passive stability, bi-directional vision, and designated locations for future improvements.
Check out our report and the updates below! |
|
A screenshot of CS team testing the GUI Program, mostly with the compass showing the yaw rotation on the submarine. 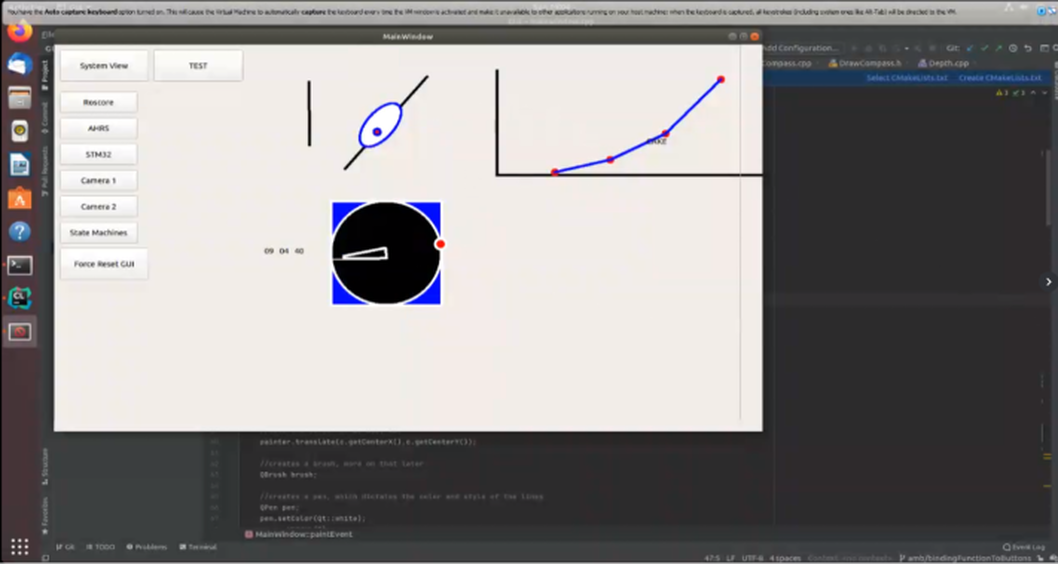 Screenshot of the CS team testing the PID (Proportional, Integral, Derivative) values, to tune them within Gazebo. The purpose of Gazebo is to simulate the submarine and the above values facilitate course correction by maintaining accuracy in movement. 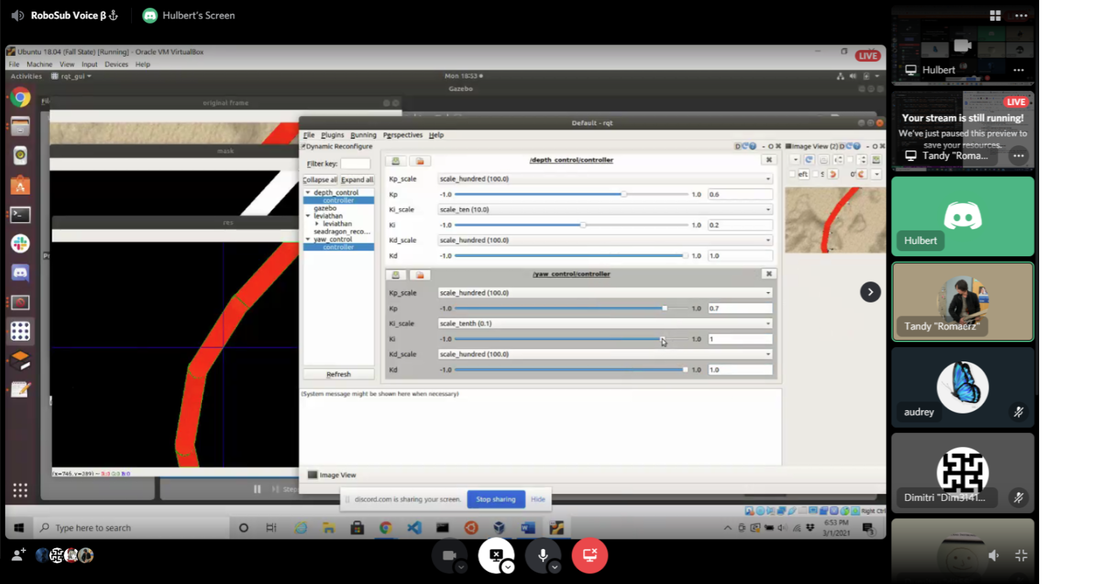 Shows how to use 'Labellmg,' for CV recognition of targets. This further allows for 'data tag' in order to train machine learning model. Shows the different uses and examples in ROS for mostly Software's Automation subgroup. Shows examples in ROS for Software's Automation subteam. Shows how to run ROS and use State Machines made in Python with Smach to control the submarine. |


 RSS Feed
RSS Feed
